
编者按:本文作者为深圳极视角科技有限公司联合创始人,雷锋网(公众号:雷锋网)专栏作家,游走在计算机视觉业界与人工智能学术界的双重深渊。
本文作者认为影响自动驾驶的安全问题其实可以归结到两大问题:网络安全问题以及智能化水平是否足够的问题。
今年5月,特斯拉自动驾驶汽车发生了一起致命意外,一时间无人驾驶的安全性被推到了风口浪尖。
一直以来,虽然各个自动驾驶开发企业都都在不断的公开自动汽车的路测数据,但是自动驾驶的安全性问题一直是业内外认识争论的关键点,也是自动驾驶汽车能否顺利上路和顺利获得乘客、用户使用的关键。

Uber Autonomous Car(图来自yifan,摄于2016.8.25,美国)
自动驾驶的安全问题其实可以归结到两大问题:
一是网络安全问题,和所有智能设备一样,智能汽车也必然会存在被入侵,然后被操控的风险,并且一旦被入侵控制了,后果远比任何一个目前的智能设备被入侵了要严重。
二是智能化水平是否足够的问题,对道路的规划、定位、目标的识别、判断等等智能化水平是否足够,一旦智能化水平不够,该识别的行人识别错了,该前进的路线规划错了等等,后果也是无法设想。
网络安全问题
无人驾驶或者说自动驾驶汽车在网络安全方便的问题可以说无可避免,就像所有的智能设备,只要设备拥有IP地址,通过IP可以入侵到汽车,从而控制汽车的引擎和刹车系统。
以这辆吉普(Jeep Cherokee)为例,车辆通过IP连接到克莱斯勒的网络中心。克莱斯勒在被黑客发现漏洞入侵之前发布了软件补丁修补了系统的漏洞。主要的问题是,开发系统的软件工程师大多没有考虑安全性的问题。
还有另外一个真实的例子,克莱斯勒花了巨额把自动汽车返厂修复漏洞。因为一旦其中一辆汽车被入侵了,同样的方法几乎可以入侵所有的汽车,所以,相比起这样的安全危机,花费的巨额也是必须的。
如果是一个智能电冰箱,那么冰箱被入侵了可能只是食物变质了,冰块融化了,但是如果是汽车被入侵了,就会产生致命的交通事故。
在最新一次的国际黑客大会上,有黑客扬言,已具备足够能力远程控制装置自动驾驶系统的热门电动车型,让车辆根据黑客自己的意愿进行操作(如转向),以及改变雷达探测距离数值(等探测到都已撞上了)。
不想遇到网络安全问题,最先想到的当然是隔离网络,所以出于安全考虑,汽车的关键系统如引擎和刹车系统都最好与网络隔绝,但是,实际情况中,因为考虑到成本问题,所以一些联网的娱乐系统会和汽车的关键系统会连在同一台分析电脑上,从而导致所有系统都是联网的。
如果实在是要联网的话,为了防止被恶意入侵控制,所以会限制必须通过有线连接才可以对系统做控制修改。
除此之外,为了确保系统的安全性,在网络授权,代码保护和使用第三方技术供应商的审核上都是需要严格把关的。举个例子,一般第三方的技术提供方都会提供对应的测试代码(Sample Code),而这些代码都是没有考虑任何安全问题的情况下使用的,所以,出于安全考虑,尽量不要直接使用测试代码。再比如,不同的系统之间采用不同的网络授权,也是目前常用的提高安全性的做法。
智能化的错误判断问题
除了网络安全的问题外,最引人注目的无人驾驶的安全性问题莫过于智能化判断的准确度的问题,今年5月特斯拉自动驾驶汽车发生的致命意外,经过调查后发现其中一个原因是汽车把前面一个白色的车厢判断为了是天空,如图,这个在人工智能领域备受关注的“人工智能安全性”的问题,如何才能得出安全的人工智能,从而避免像类似的事故不在发生。
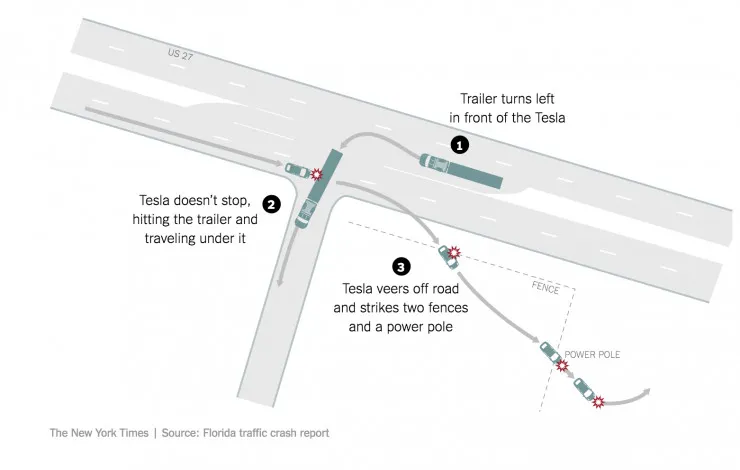
Tesla Car Accident
从软件算法层面,目前全球范围内,致力于实现安全的人工高智能(Safe AI)的组织中,最出名的莫过于OpenAI,他们致力于让人工智能不要犯致命的错误。
在人类的眼里,可能图像中一些细微的变化不糊影响我们去判断一个事物,但是在机器的眼里,可能就会完全看作是两个事物(fooling samples),从而做出不同的应对行为,这种情况特别容易出现在通过深度学习训练目标以及在单目摄像头下的视频数据。
特斯拉的事故不仅暴露了自动驾驶技术目前在软件算法上的短板,同时也暴露了在硬件技术的短板。
从硬件设备层面,像Model S采用的单目摄像头对于立体及大面积平面物体的识别存在硬伤、毫米波雷达存在识别区间限制、以及在极端情况下对于综合情景的取舍及冗余判断等问题。
所以,事故对自动驾驶领域的硬件及算法产生促进,对于双目/广角摄像头、毫米波雷达、激光雷达的综合采用将可望迎来破冰。特别是对于之前成本较高的激光雷达+多摄像头方案会带来推动作用。另外,特斯拉的事故如果采取的是多探测器冗余判断模式,完全可以避免。
所以,出于安全性考虑,NHTSA(美国高速公路安全管理局)也有可能会在硬件配置及系统要求上,敦促相关部门出台较高门槛及规定,这对于行业而言,意味着单车附加值的提升。
虽然,自动驾驶安全隐患仍然存在着,也不可避免的存在的风险问题,但是,有一点可以确定的是,对比起目前94%的交通事故是人为原因造成的,自动驾驶的持续研究和发展必然是对人类的人身安全有着重要的意义。
本文作者:罗韵
本文转自雷锋网禁止二次转载,原文链接


